Poster

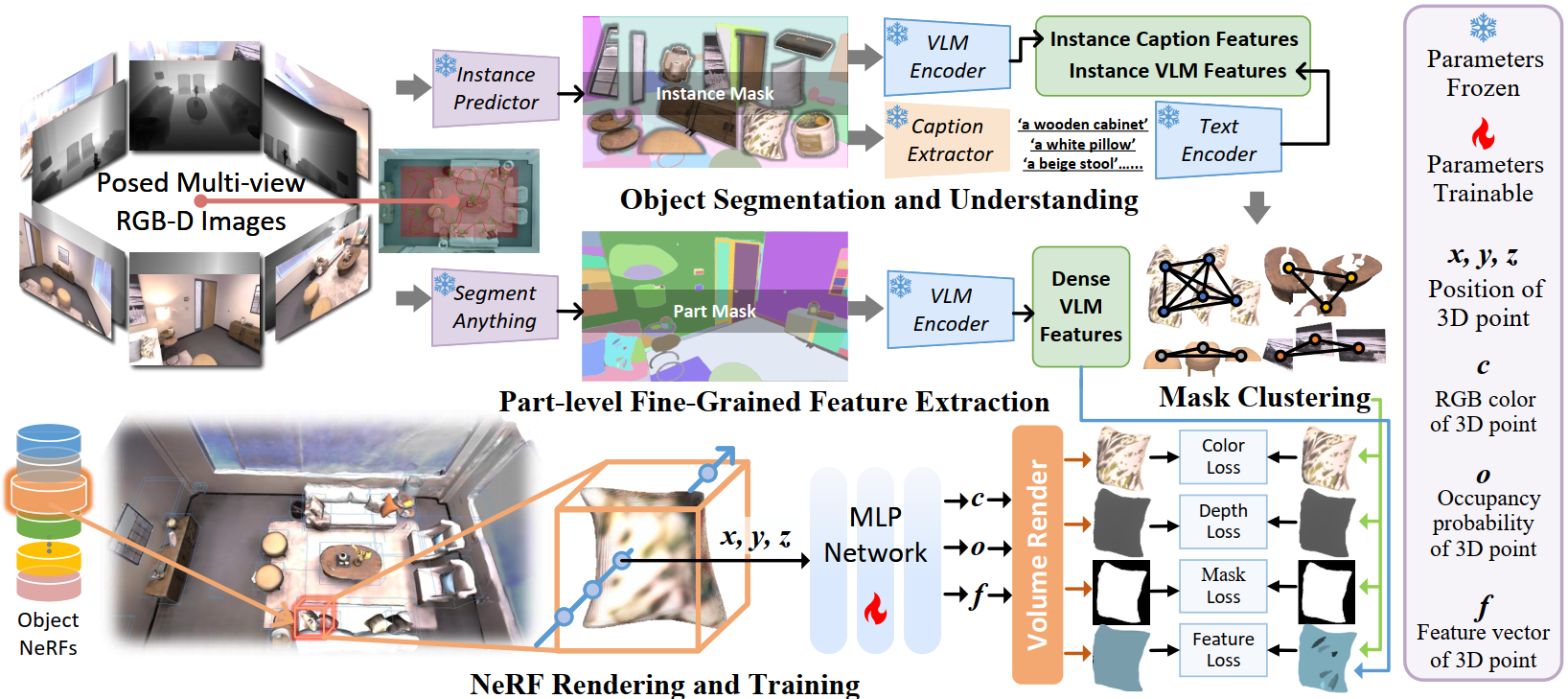
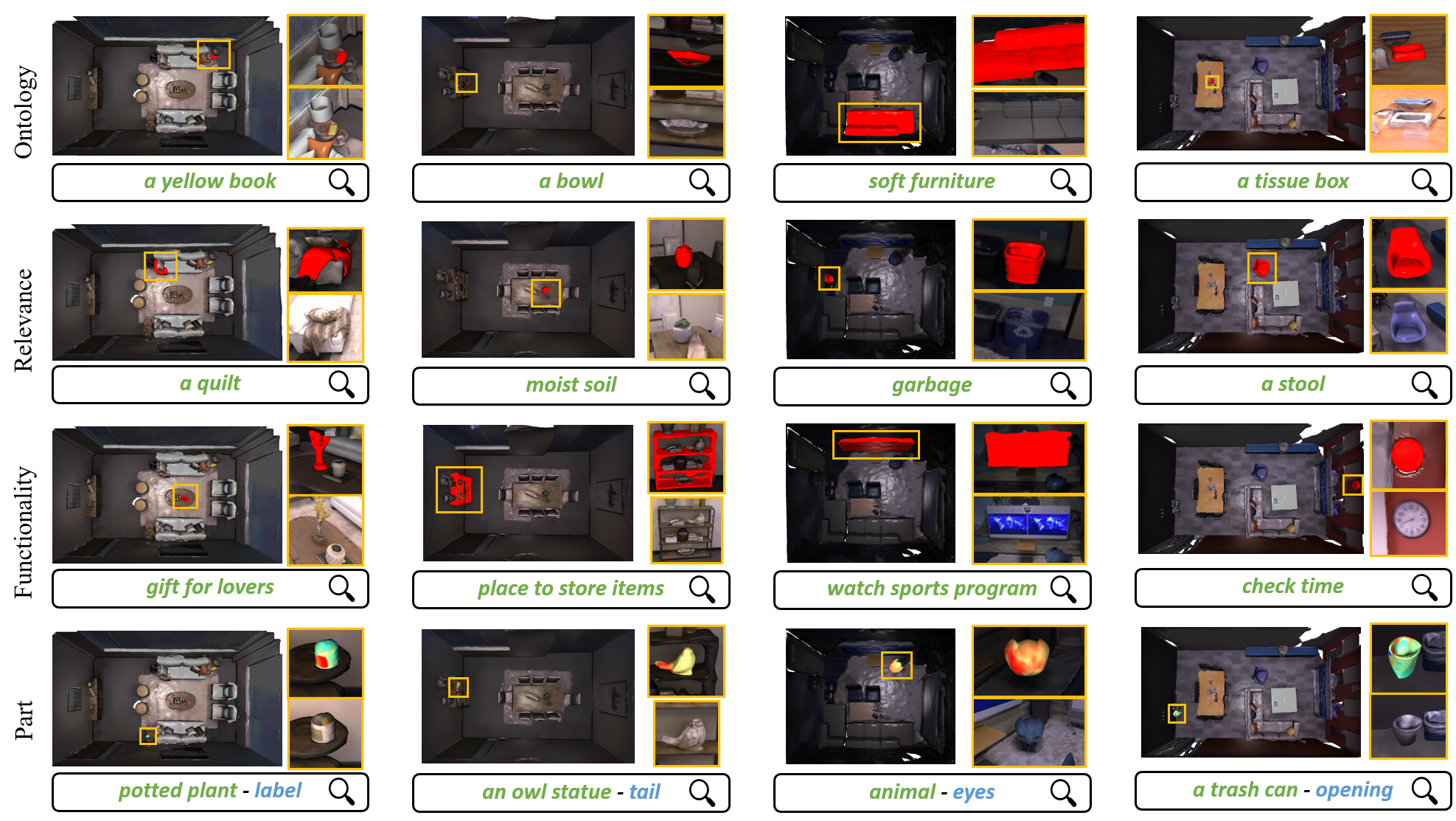
In recent years, there has been a surge of interest in open-vocabulary 3D scene reconstruction facilitated by visual language models (VLMs), which showcase remarkable capabilities in open-set retrieval. However, existing methods face some limitations: they either focus on learning point-wise features, resulting in blurry semantic understanding, or solely tackle object-level reconstruction, thereby overlooking the intricate details of the object's interior. To address these challenges, we introduce OpenObj, an innovative approach to build open-vocabulary object-level Neural Radiance Fields (NeRF) with fine-grained understanding. In essence, OpenObj establishes a robust framework for efficient and watertight scene modeling and comprehension at the object-level. Moreover, we incorporate part-level features into the neural fields, enabling a nuanced representation of object interiors. This approach clearly captures object-level instances while maintaining a fine-grained understanding. The results on multiple datasets demonstrate that OpenObj achieves superior performance in zero-shot semantic segmentation and retrieval tasks. Additionally, OpenObj supports real-world robotics tasks at multiple scales, including global mobility and local manipulation.

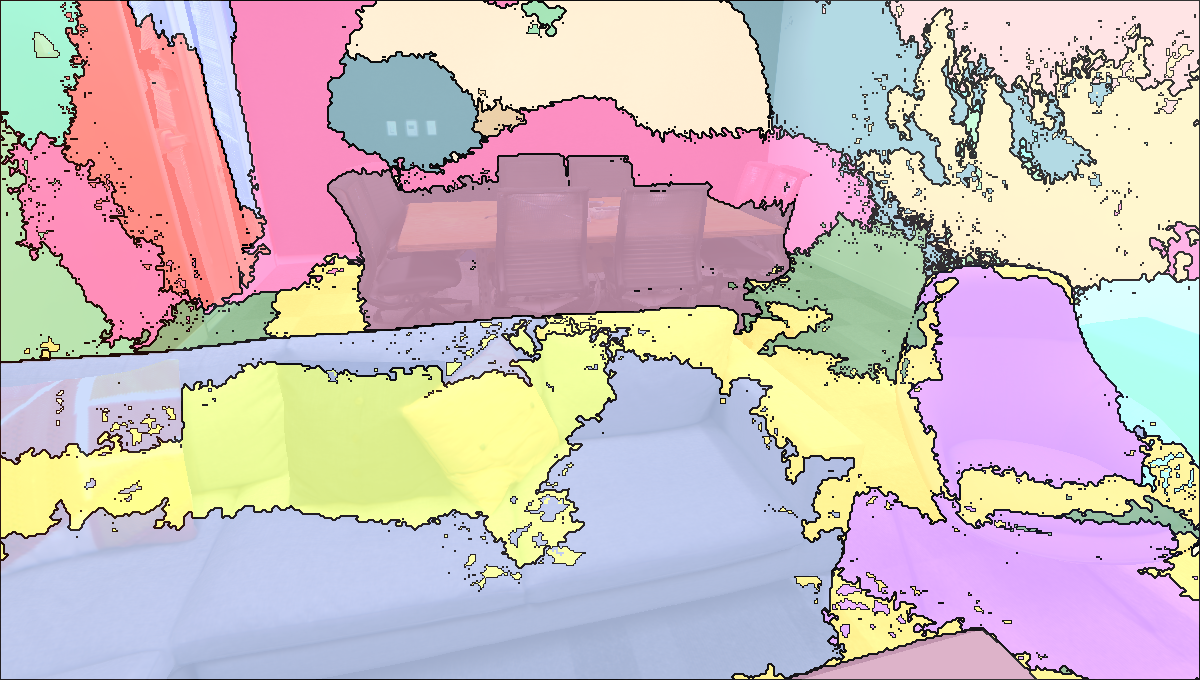
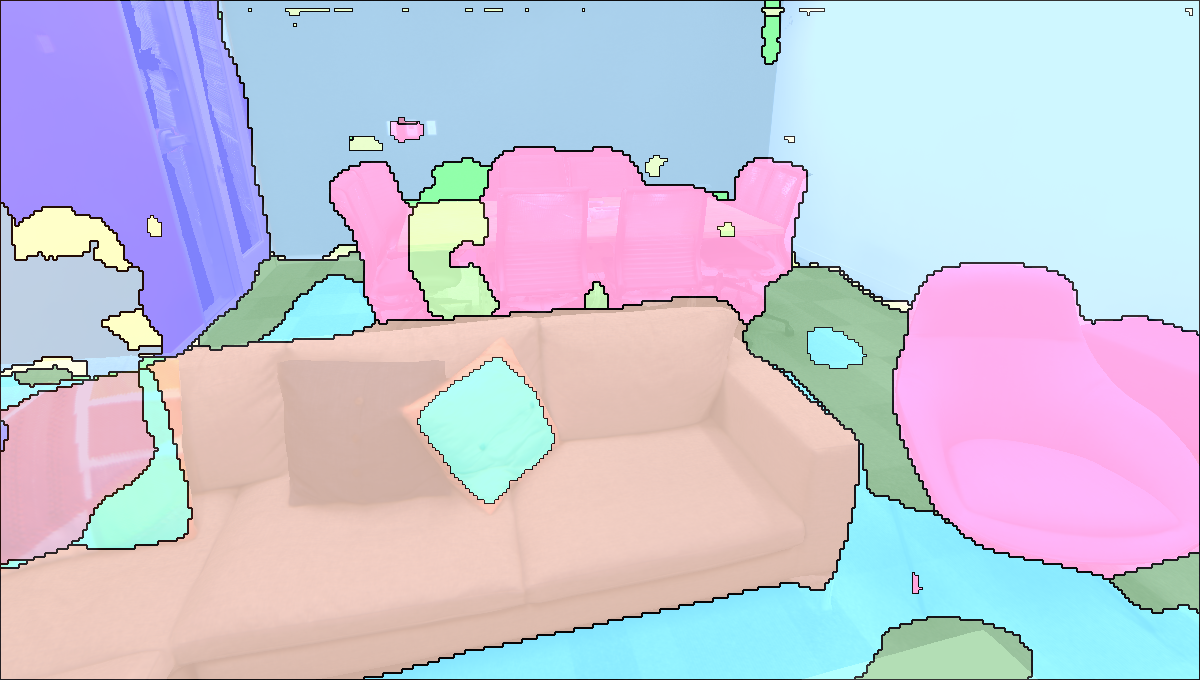
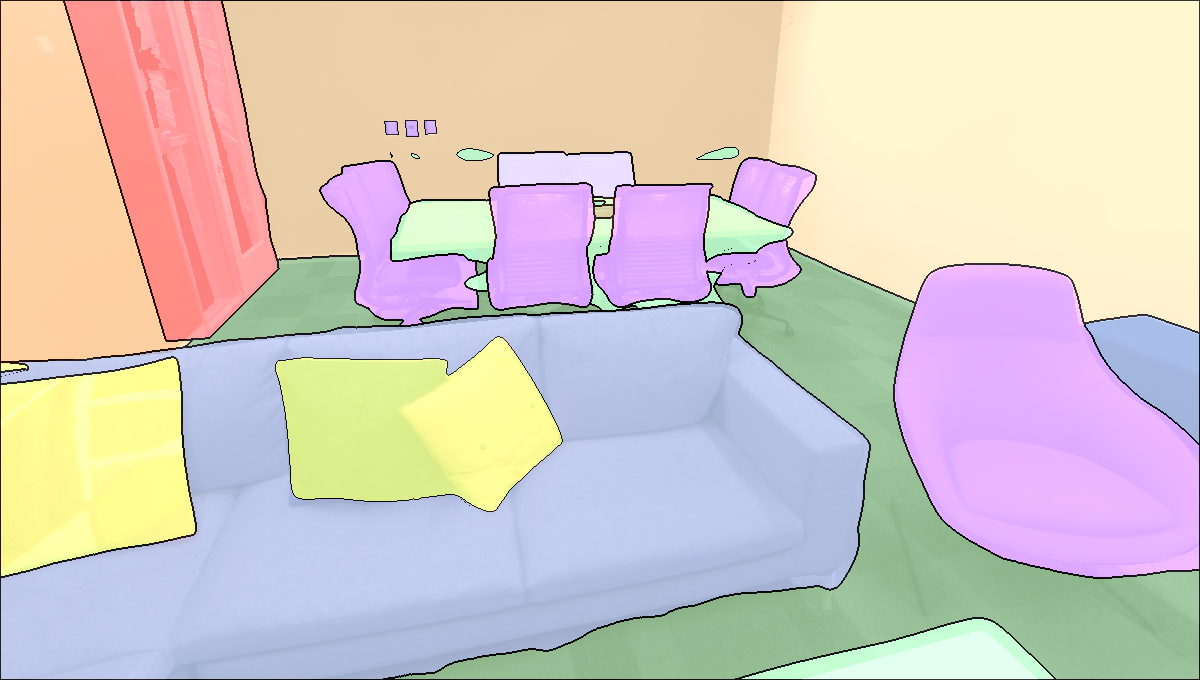

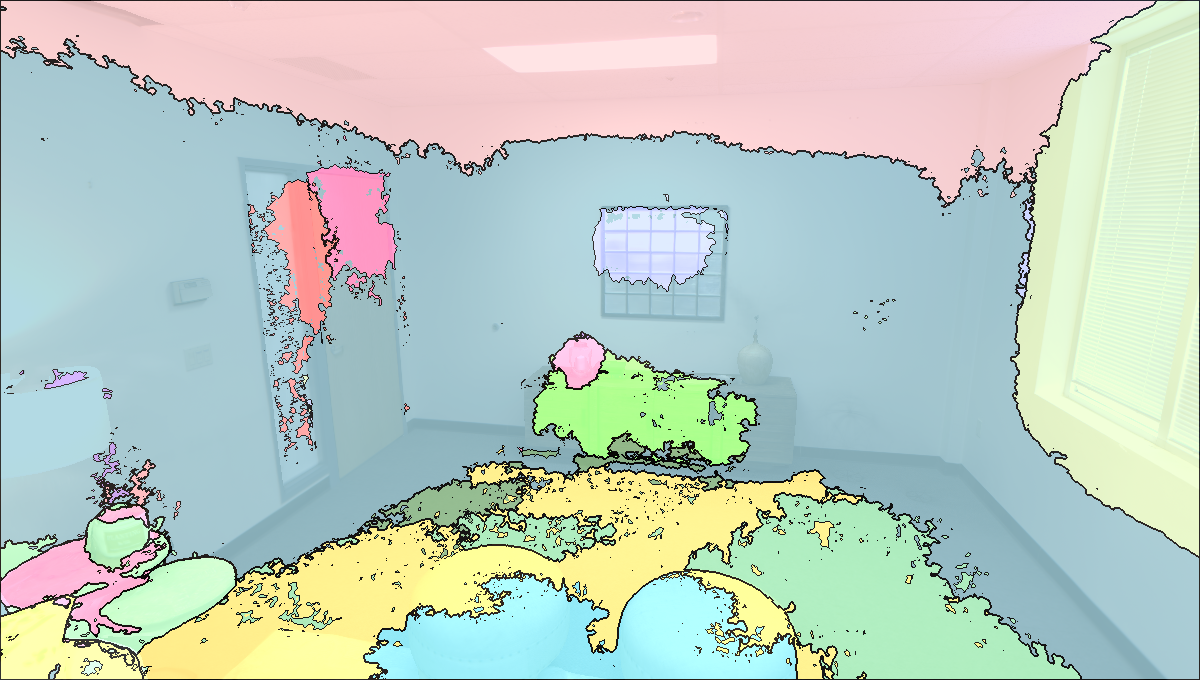
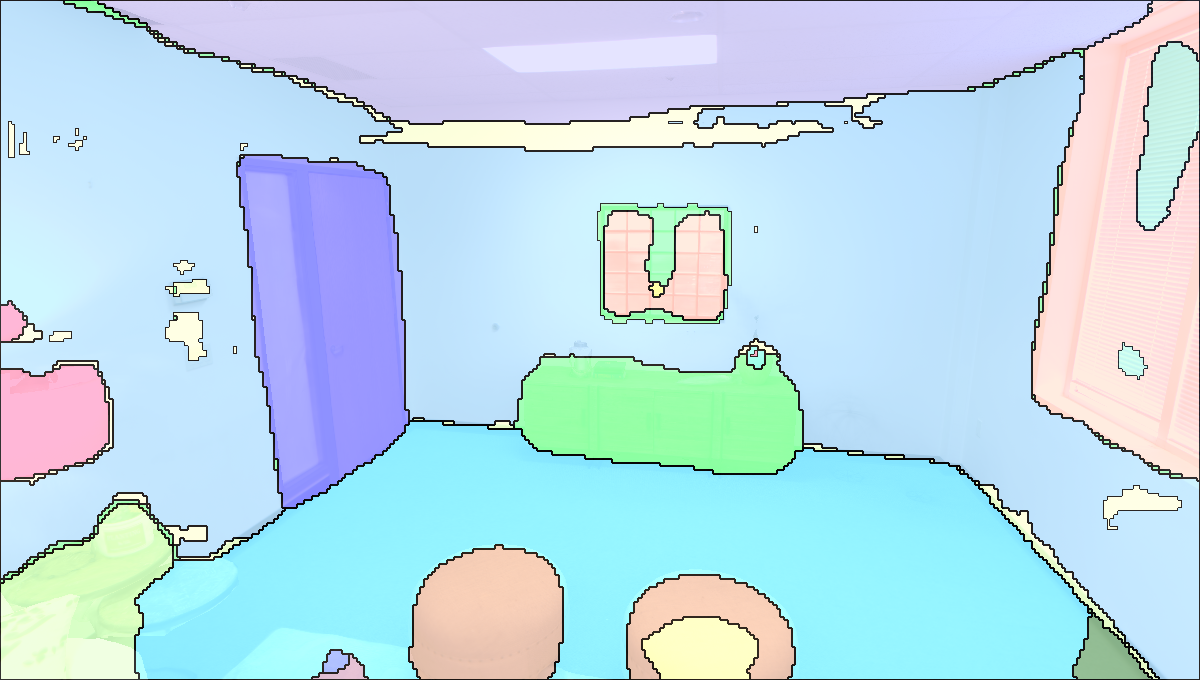
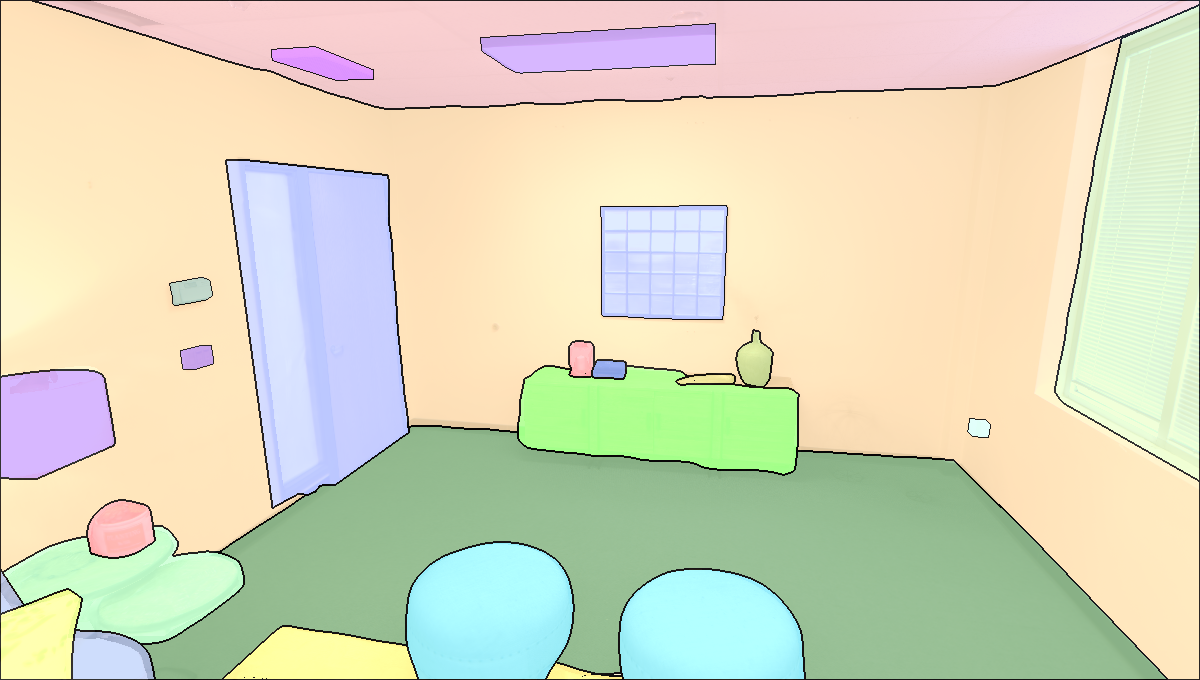
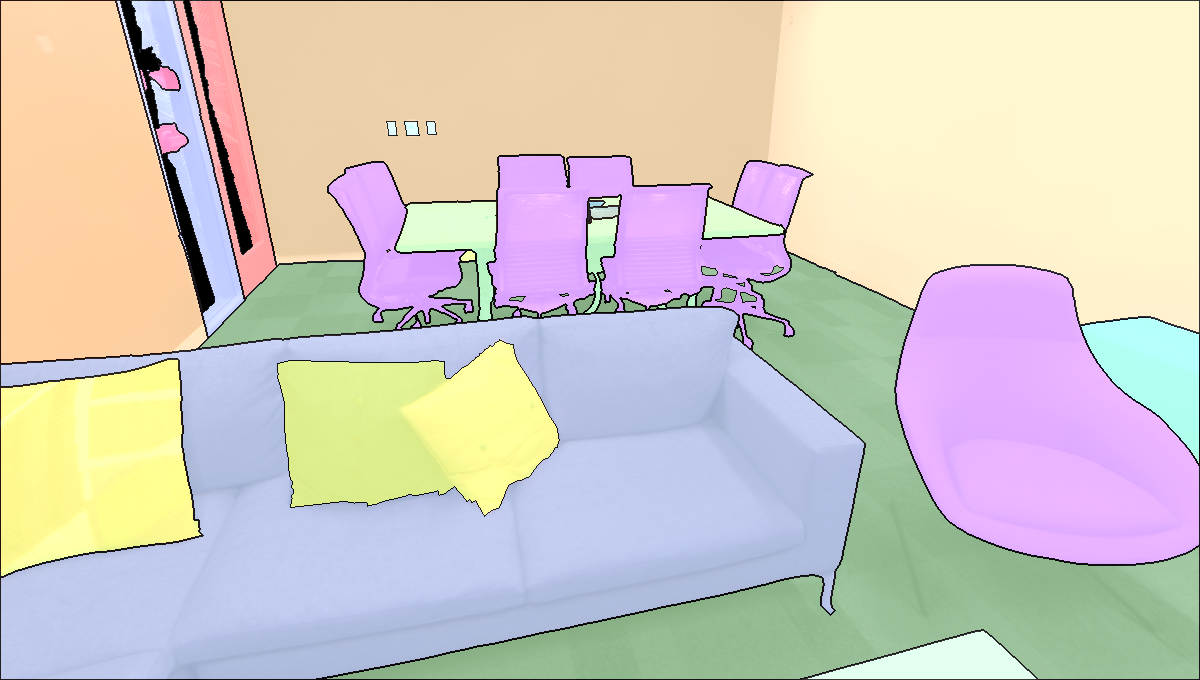
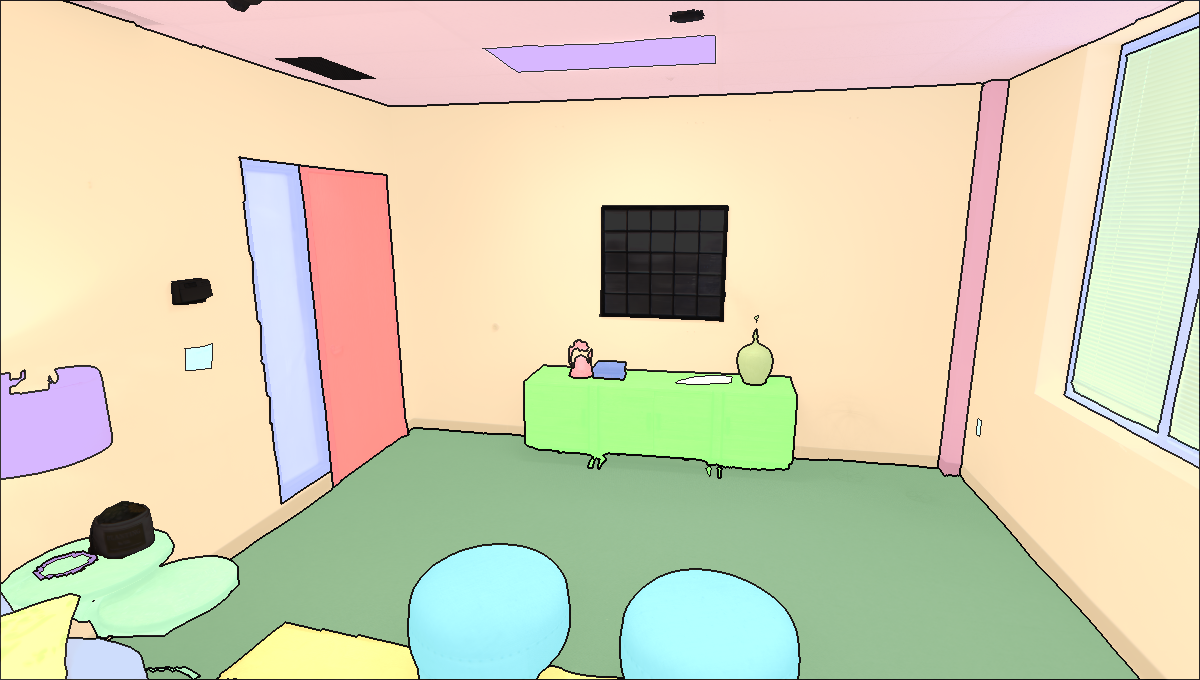
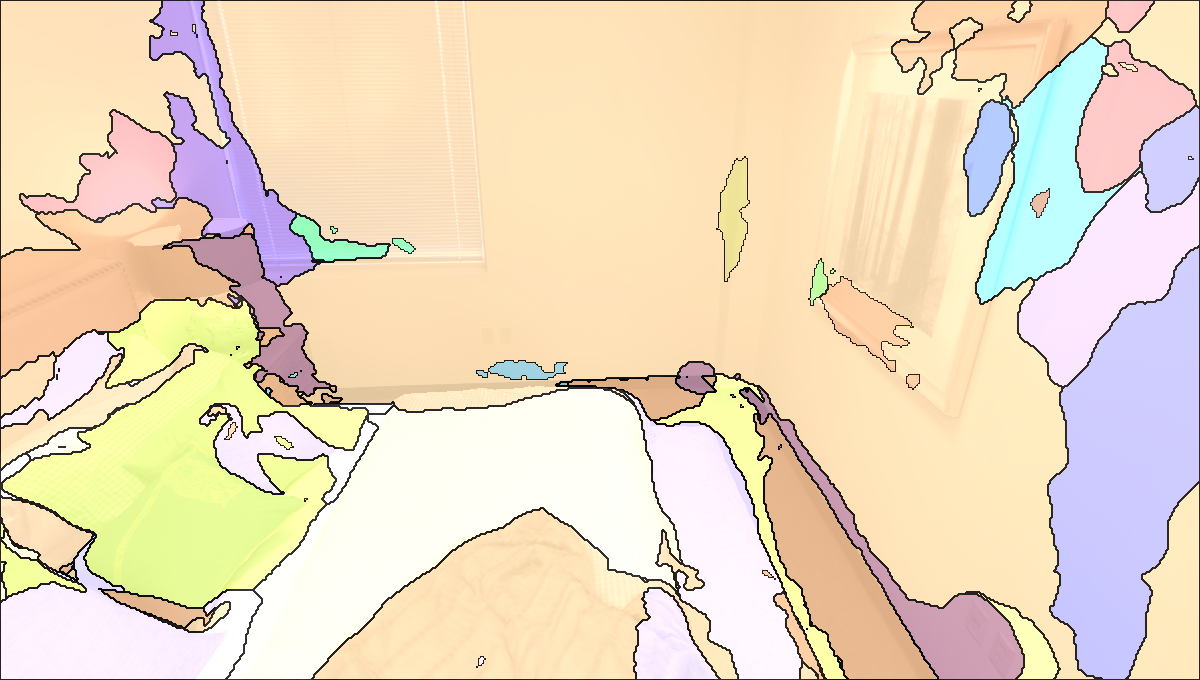
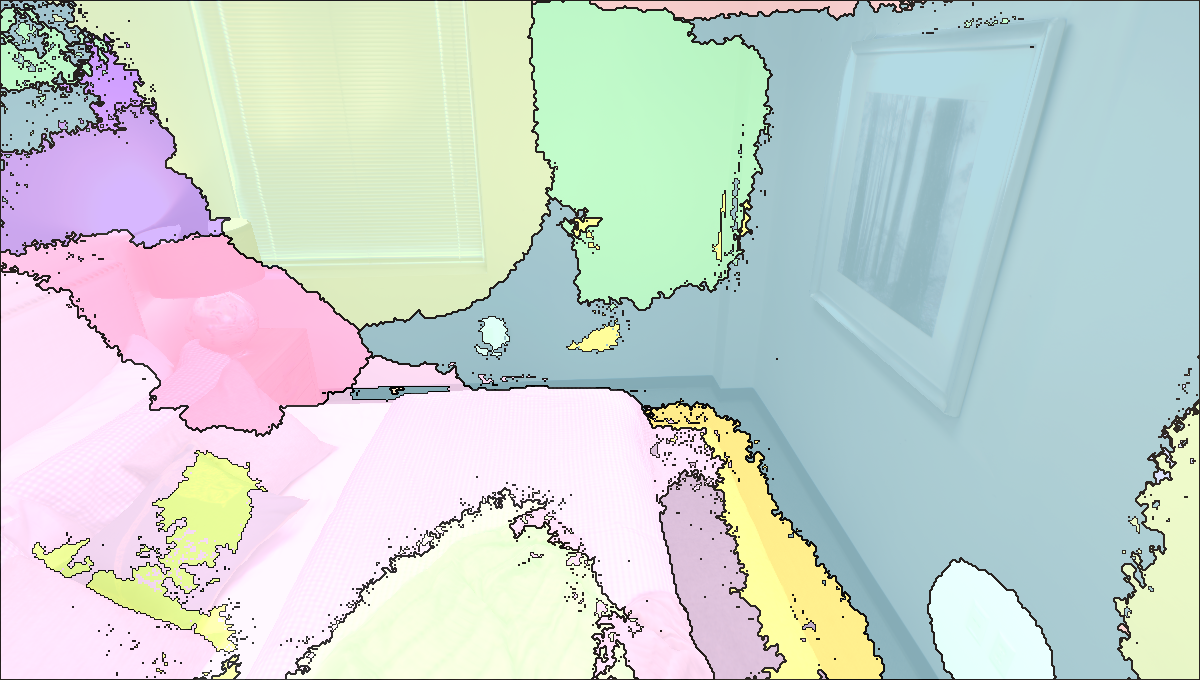
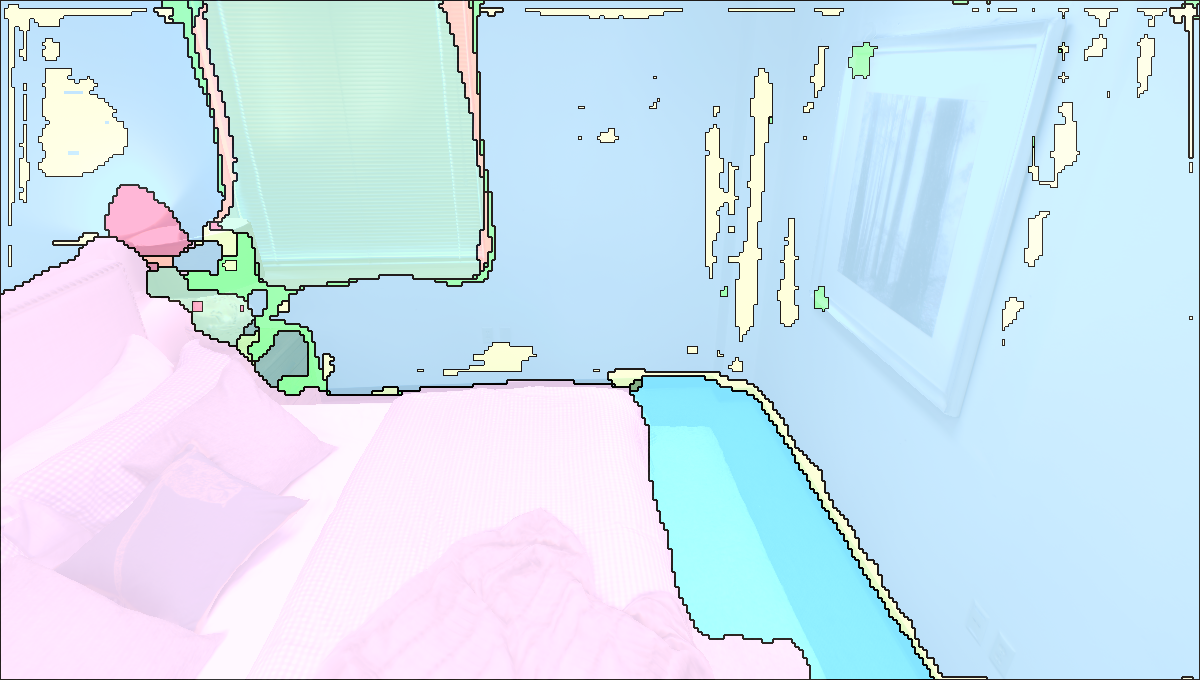
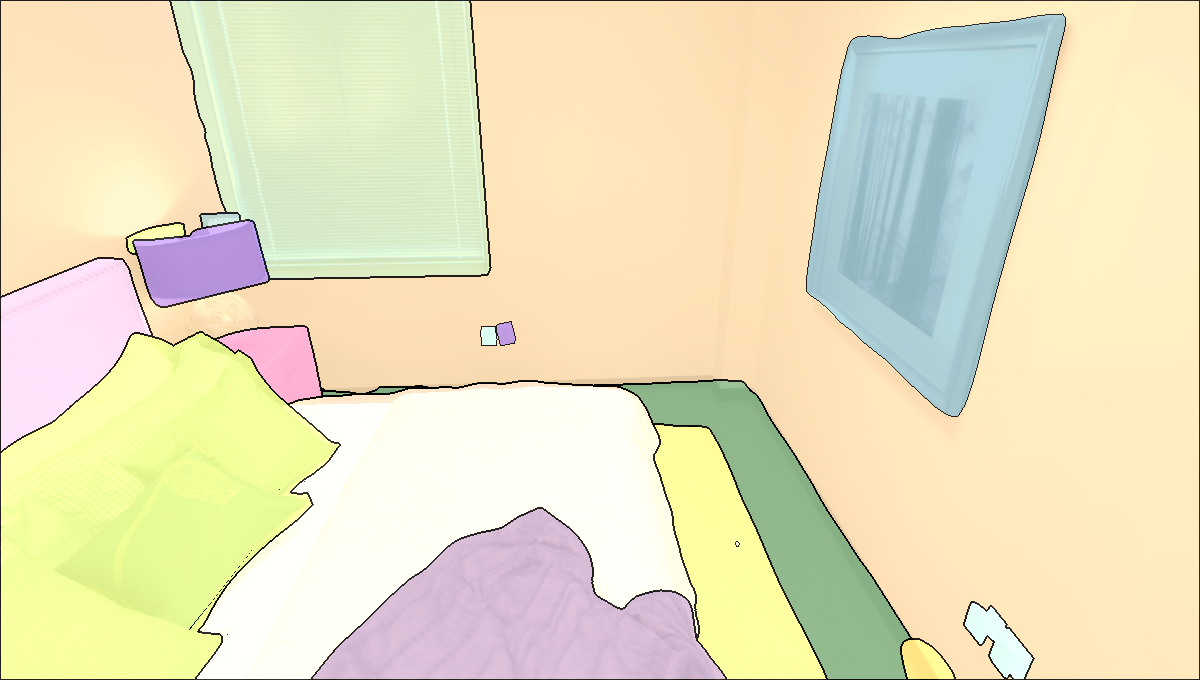
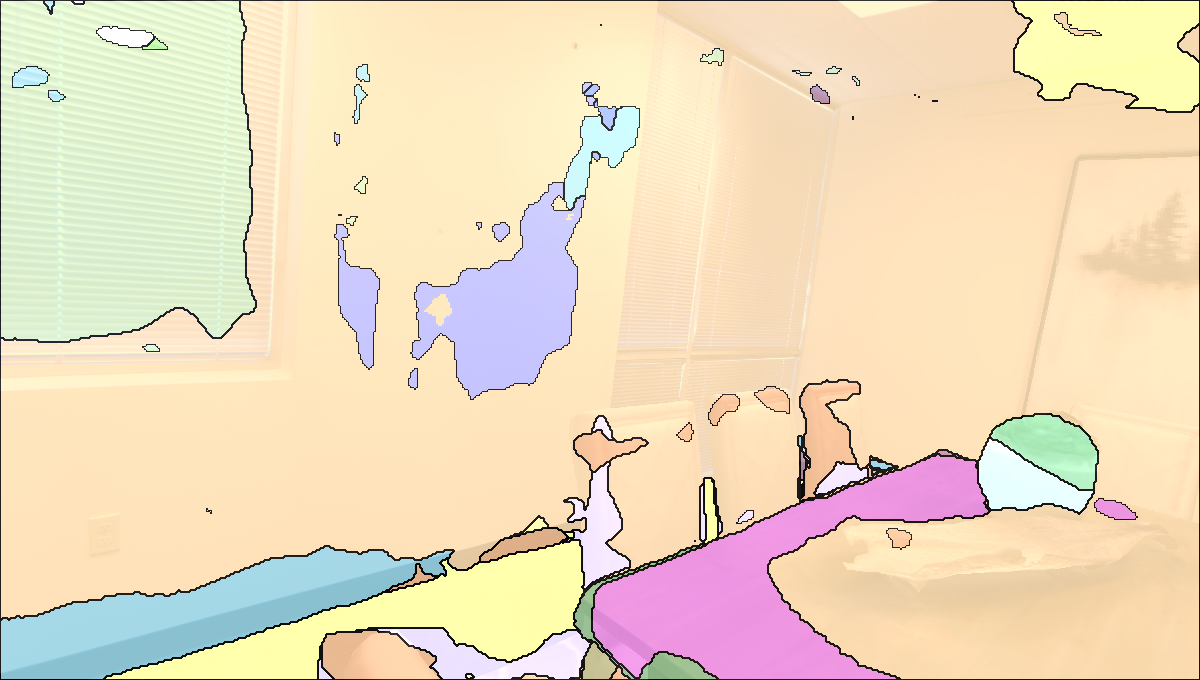
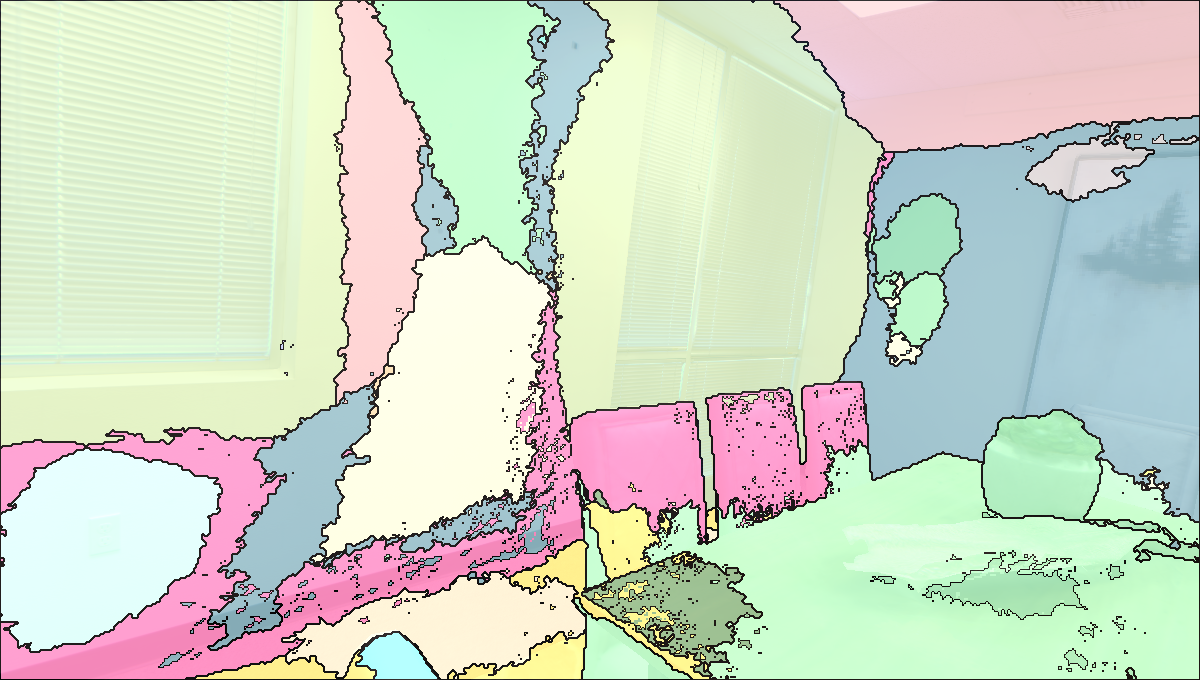
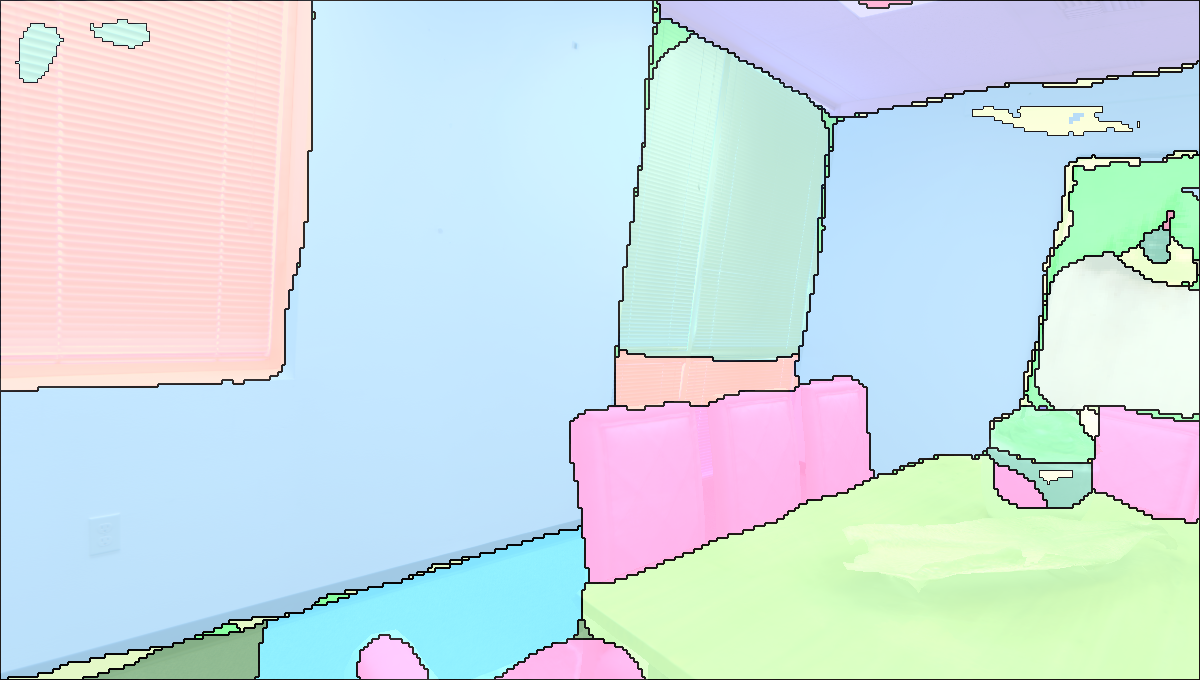
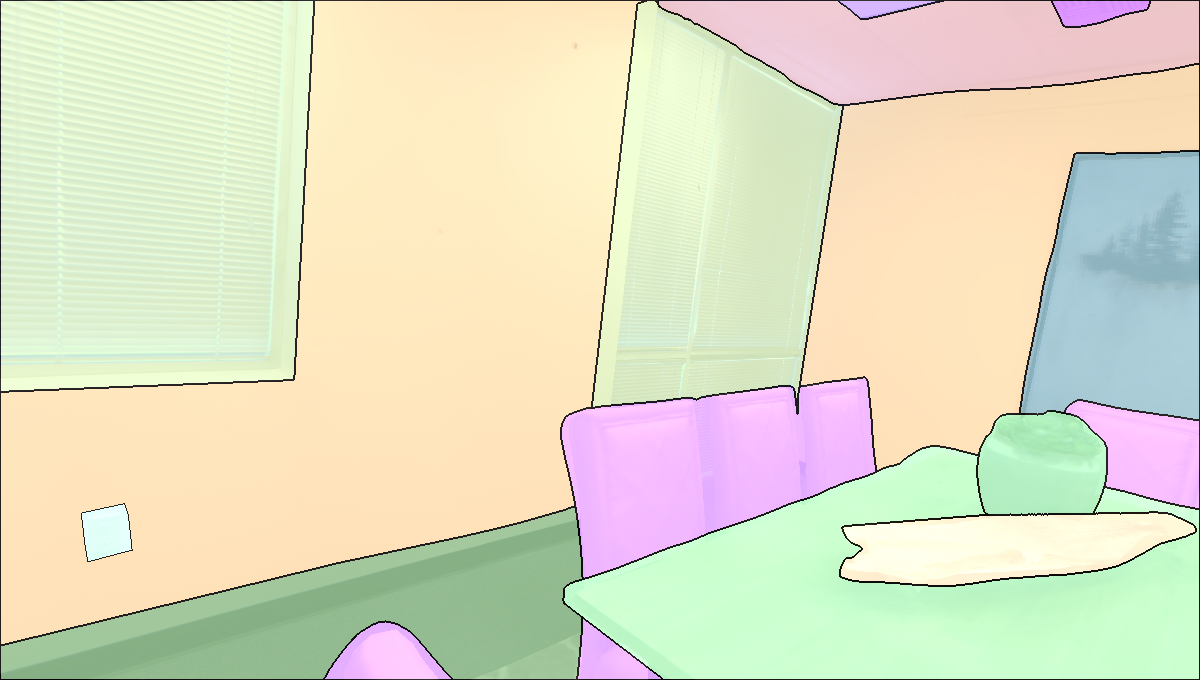
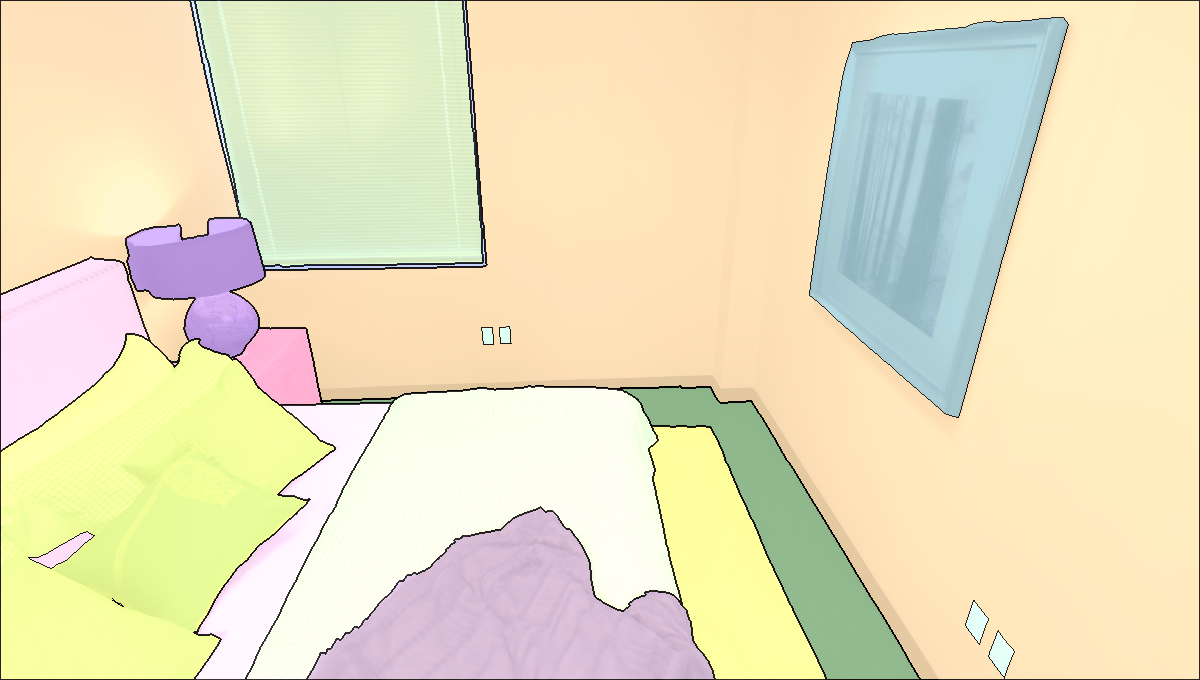
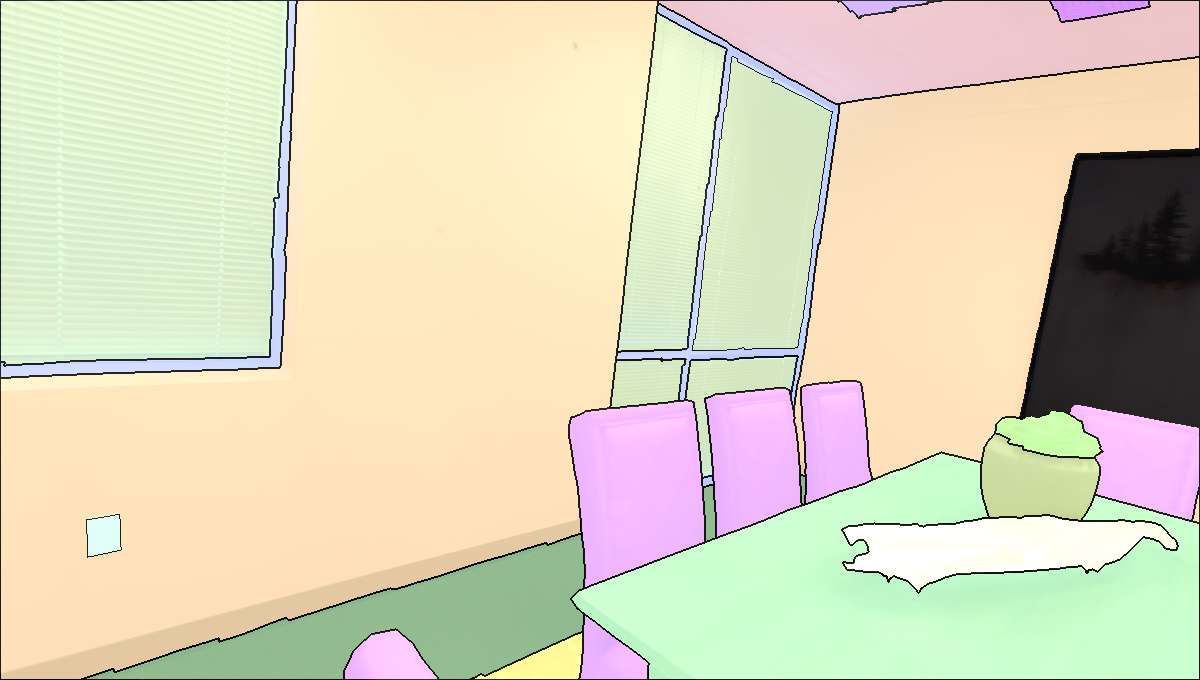
Visualisation of Scene Reconstructed by our method.
@article{deng2024openobj,
title={OpenObj: Open-Vocabulary Object-Level Neural Radiance Fields with Fine-Grained Understanding},
author={Deng, Yinan and Wang, Jiahui and Zhao, Jingyu and Dou, Jianyu and Yang, Yi and Yue, Yufeng},
journal={arXiv preprint arXiv:2406.08009},
year={2024}
}